Посты
🫢 Из чего же, из чего же, из чего же сделаны наши... роверы Подробно весь процесс сборки…
7 декабря 2024 г. в 10:14•Max Knyazev is typing…Зеркало Telegram
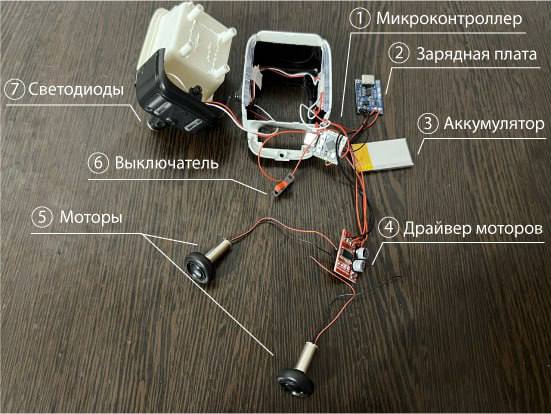
Подробно весь процесс сборки я описывал в моей статье на Хабре, но так как ее читали не все, решил сделать небольшой пост с "анатомией" модифицированных роверов
1. Микроконтроллер. В ровере я использую ESP32-C3 SuperMini. Микроконтроллер получает команды от пользователя через смартфон и обрабатывает их, преобразуя в действия. Именно он позволяет вам подключаться к игрушке с помощью приложения, включать и выключать подсветку, а также давать команды моторчикам🧠
2. Зарядная плата. Она защищает аккумулятор ровера от переразряда и перезаряда, обеспечивая стабильную работу устройства. В ровере я использую плату TP4056⚡️
3. Аккумулятор. В ровере я использую маленький литий-полимерный аккумулятор на 350 mAh с питанием в 3,7 Вольт. Аккумулятор накапиливает и предоставляет энергию для работы ровера🔋
4. Драйвер моторов. Его можно сравнить с нервной системой человека. Подобно тому, как нервы передают сигналы от мозга к мышцам, заставляя их двигаться, драйвер моторов передает команды от "мозга" робота к двигателям. В ровере я использую L298N mini⚡️ ⚡️
5. Моторы. В ровере я раньше использовал 716 моторы от квадрокоптеров, но в виду их нестабильной работы и низкого крутящего моменты решил перейти на моторы с планетарными редукторами. Именно они являются мышцами ровера, которые позволяют ему передвигаться🛞
6. Выключатель типа ON/OFF. Он позволяет вручную включать и выключать питание ровера, пропуская ток от аккумулятора к микроконтроллеру🔚
7. Светодиоды. Они обеспечивают подсветку ровера и его фар💡
Теперь вы стали лучше понимать устройство вашего маленького робота-доставщика. Пусть это сделает ваш день чуточку интереснее
#робот_доставщик